Domestic Conference Articles
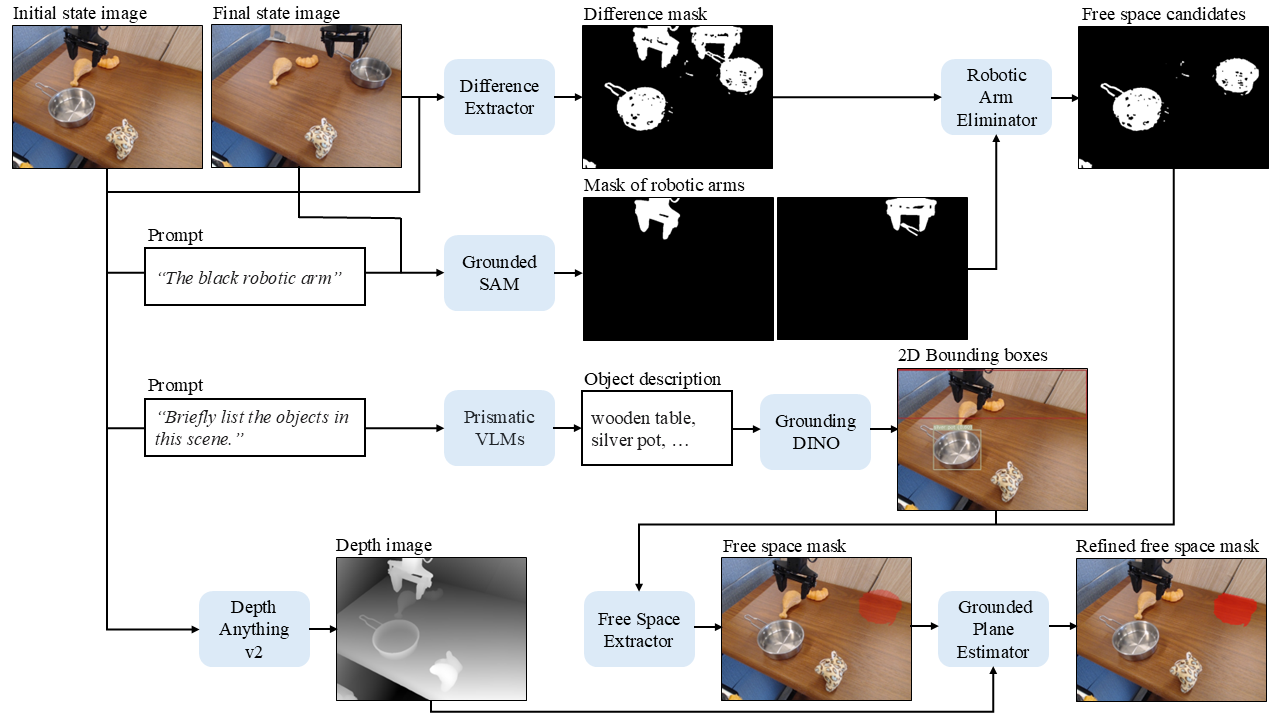
A Training Dataset for Pixelwise Grounding of Object Placement from Natural Language Instructions
Junhyeong Bang, Dohyun Kim, Ahyoung Seong, Daehyung Park
Institute of Control, Robotics and Systems (ICROS), 2025
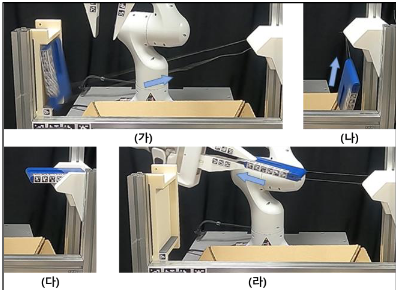
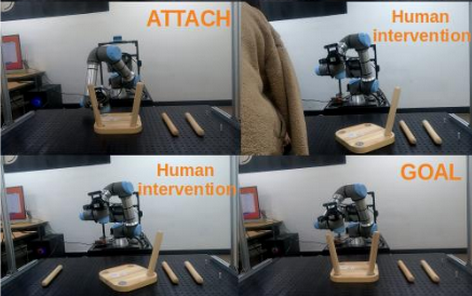
Automated Reset System for Real-world Shallow Depth-Insertion Policy Learning
Seunghyuk Hyun, Minwoo Cho, Daehyung Park
Institute of Control, Robotics and Systems (ICROS), 2025
Best Undergraduate Paper Award
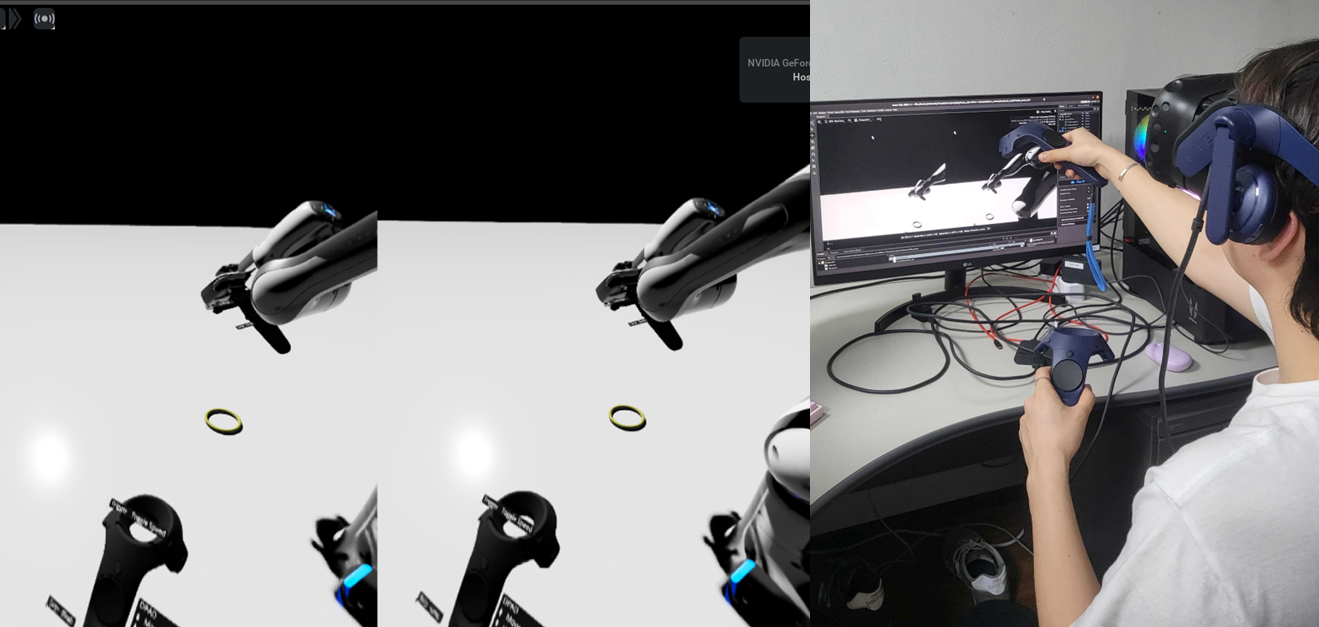
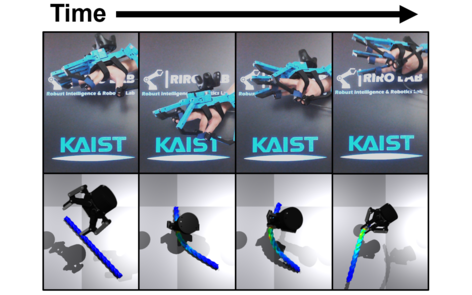
Development of VR Teleoperation System and Collecting Demonstration for Deformable Object Manipulation
Minseok Song, Bonggyeong Park, Daehyung Park
Institute of Control, Robotics and Systems (ICROS), 2024
Best Undergraduate Paper Award
Reactive Task Planning using Scene Graph for Robust Robotic Manipulation
Ulzhalgas Rakhman, Jaehoon Yoo, Yeseung Kim, Deokmin Hwang, Seunghoon Hong, Daehyung Park
Korea Robotics Society Annual Conference (KRoC), 2022
Outstanding Paper Award
Transferable-Reward Decomposition for Inverse Reinforcement Learning
Jaehwi Jang and Daehyung Park
Korea Robotics Society Annual Conference (KRoC), 2022
A Telemanipulation Suite for Deformable Object Manipulation
Bonggyeong Park, Chanyoung Ahn, Daehyung Park
Korean Artificial intelligence Association (KAIA), 2022
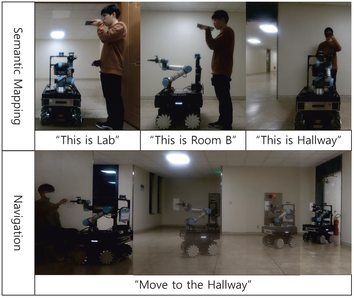
A Framework for Natural Language-guided Semantic Mapping and Mobile Navigation
Jinwoo Kim, Dohyun Kim, Daehyung Park
Korea Robotics Society Annual Conference (KRoC), 2022
Bias tree expansion using reinforcement learning for efficient motion planning
Minsung Yoon, Daehyung Park, Sung-Eui Yoon
Korea Robotics Society Annual Conference (KRoC), 2021
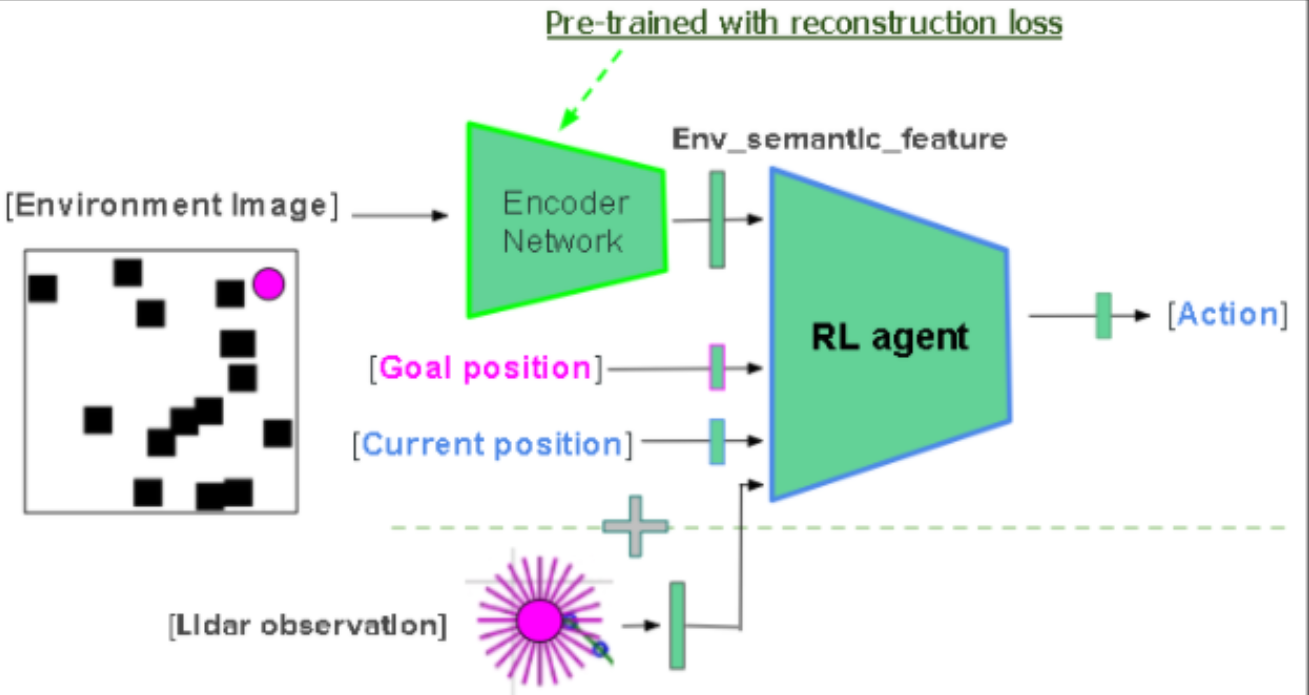
Robust Robot Navigation against External Disturbance using Deep Reinforcement Learning
Hyeongyeol Ryu, Minsung Yoon, Daehyung Park, Sung-Eui Yoon
Korea Robotics Society Annual Conference (KRoC), 2021