Publications
Journal Articles
- Daehyung Park, Yuuna Hoshi, Harshar P. Mahajan, Ho Keun Kim, Zackory Erickson, Wendy A. Rogers, and Charles C. Kemp. “Active Robot-Assisted Feeding with a General-Purpose Mobile Manipulator: Design, Evaluation, and Lessons Learned”, Robotics and Autonomous Systems (RAS), 2019. [PDF] [Video]
- Ariel Kapusta, Philip Grice, Henry Clever, Yash Chitalia, Daehyung Park, and Charles C. Kemp. “A System for Bedside Assistance that Integrates a Robotic Bed and a Mobile Manipulator,” PLoS ONE, 2019. [PDF] [Video]
- Daehyung Park, Yuuna Hoshi, and Charles C. Kemp. “A Multimodal Anomaly Detector for Robot-Assisted Feeding Using an LSTM-based Variational Autoencoder”, IEEE Robotics and Automation Letters (RA-L), 2018. [PDF] [Video]
- Daehyung Park, Hokeun Kim, and Charles C. Kemp. “Multimodal Anomaly Detection for Assistive Robots”, Autonomous Robots, 2018. [PDF]
|
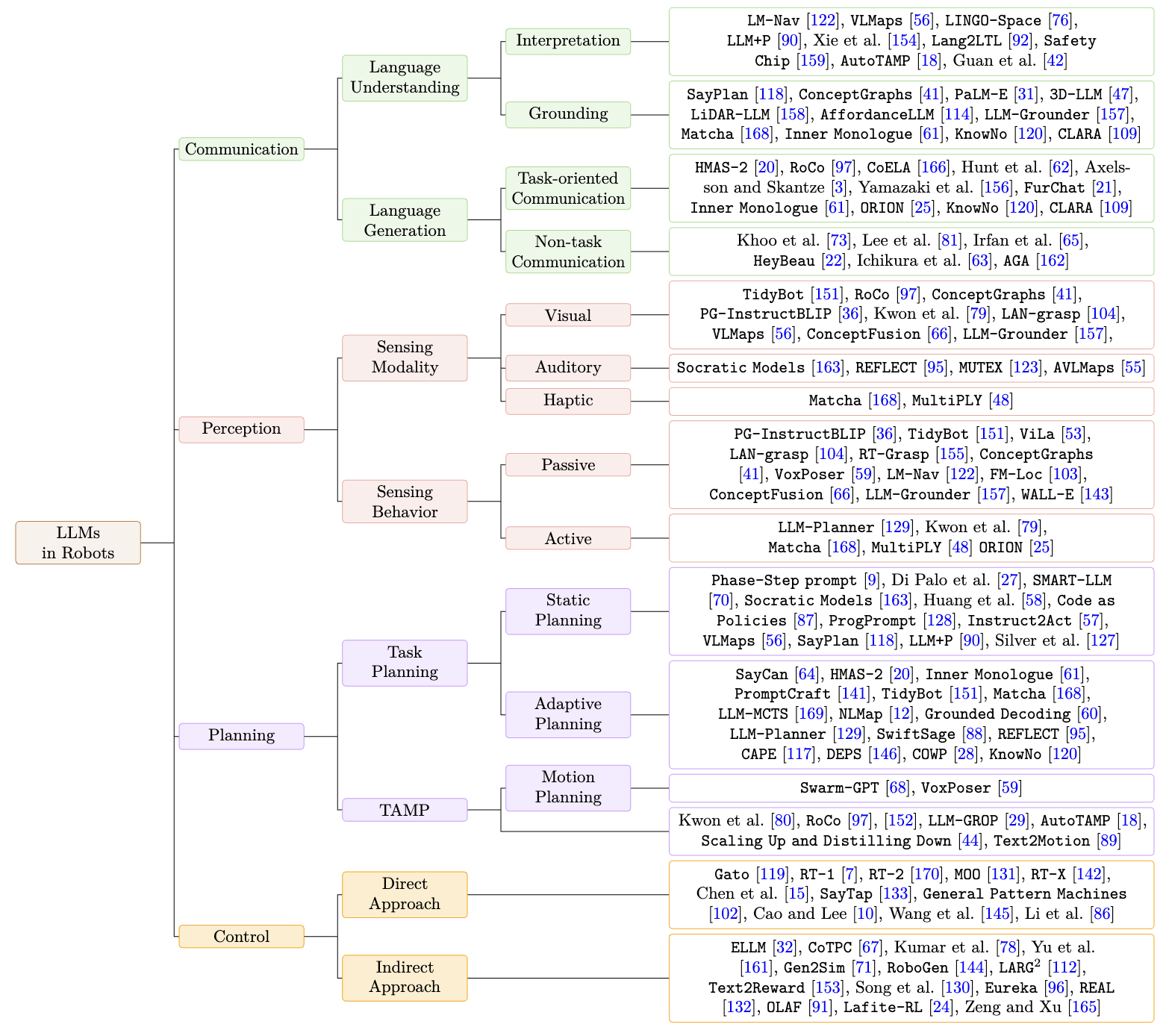
A Survey on Integration of Large Language Models with Intelligent Robots Yeseung Kim, Dohyun Kim, Jieun Choi, Jisang Park, Nayoung Oh, Daehyung Park (Under Review), 2024 [PDF] |
|
Inverse Constraint Learning and Generalization by Transferable Reward Decomposition Jaehwi Jang, Minjae Song, Daehyung Park IEEE Robotics and Automation Letters (RA-L), 2023 [PDF] [Video] [Site] |
|
GraphDistNet: A Graph-based Collision-distance Estimator for Gradient-based Trajectory Yeseung Kim, Jinwoo Kim, Daehyung Park IEEE Robotics and Automation Letters (RA-L), 2022 [PDF] [Video] |
|
An Intelligence Architecture for Grounded Language Communication with Field Robots Howard, T., Stump, E., Fink, J., Arkin, J., Paul, R., Park, D., Roy, S., Barber, D., Bendell, R., Schmeckpeper, K., Tian, J., Oh, J., Wigness, M., Quang, L., Rothrock, B., Nash, J., Walter, M., Jentsch, F., & Roy, N. Field Robotics, 2(1), 2022 [PDF] |
|
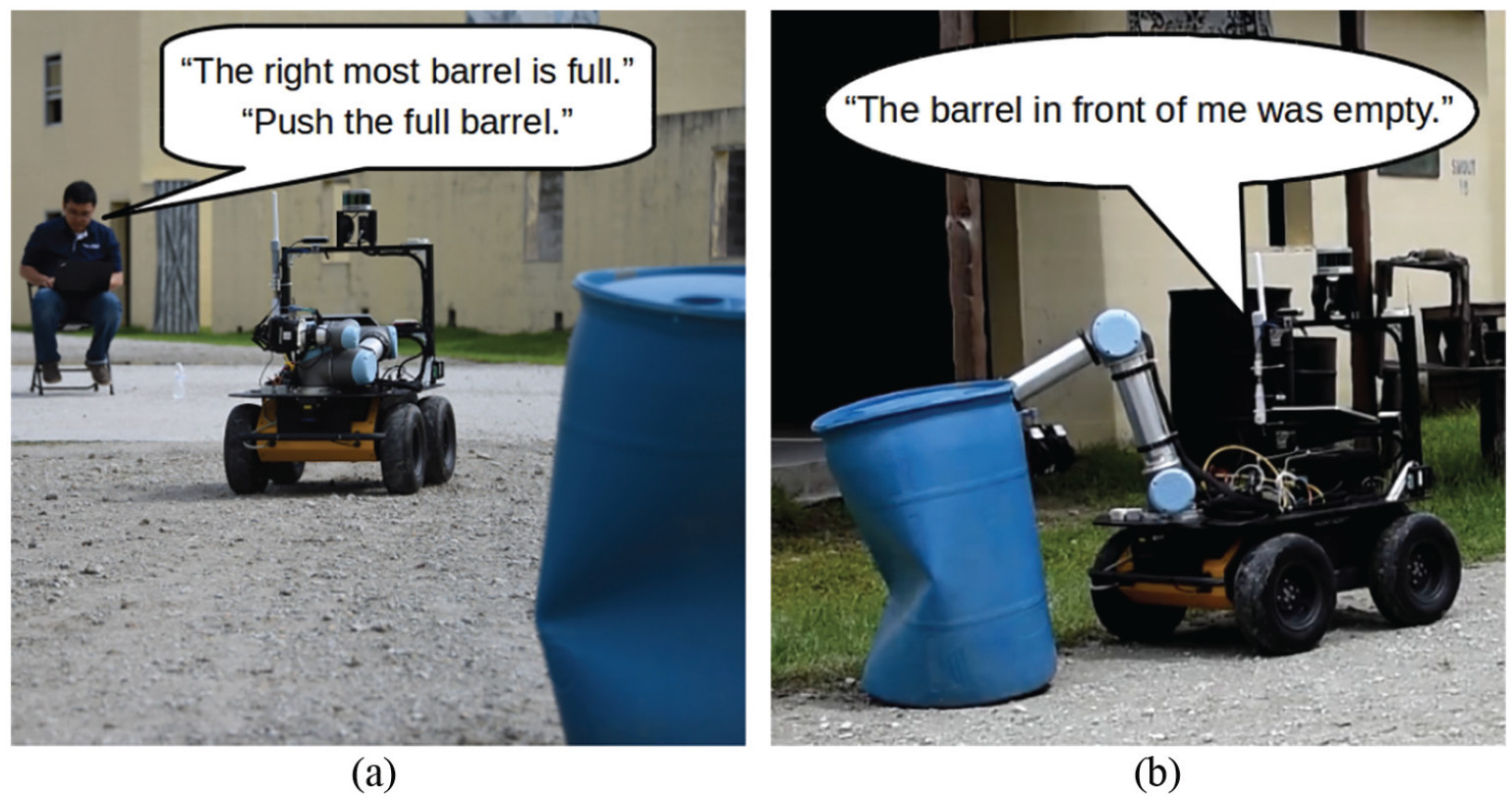
Multi-Modal Estimation and Communication of Latent Semantic Knowledge for Robust Execution of Robot Instructions Daehyung Park, Jacob Arkin, Subhro Roy, Matthew R. Walter, Nicholas Roy, Thomas M. Howard, and Rohan Paul. The International Journal of Robotics Research (IJRR), 2020 [PDF] [Video] |
International Conference Articles
- Daehyung Park, Michael Noseworthy, Rohan Paul, Subhro Roy, and Nicholas Roy. "Inferring Task Goals and Constraints using Bayesian Nonparametric Inverse Reinforcement Learning", Conference on Robot Learning (CoRL), 2019 [PDF] [Video] Oral presentation, 5% oral acceptance rate
- Michael Noseworthy, Rohan Paul, Subhro Roy, Daehyung Park, and Nicholas Roy "Task-Conditioned Variational Autoencoders for Learning Movement Primitives", Conference on Robot Learning (CoRL), 2019 [PDF] (27.6% Acceptance Rate)
- Subhro Roy, Michael Noseworthy, Rohan Paul, Daehyung Park and Nicholas Roy. "Leveraging Past References for Robust Language Grounding", Conference on Computational Natural Language Learning (CoNLL), 2019 [PDF]
- Daniel Nyga, Subhro Roy, Rohan Paul, Daehyung Park, Mihai Pomarlan, Michael Beetz, and Nicholas Roy. "Grounding Robot Plans from Natural Language Instructions with Incomplete World Knowledge", Conference on Robot Learning (CoRL), 2018 [PDF] [Video] (31% Acceptance Rate)
- Jacob Arkin, Rohan Paul, Daehyung Park, Subhro Roy, Nicholas Roy and Thomas M. Howard. "Real-Time Human-Robot Communication for Manipulation Tasks in Partially Observed Environments", International Symposium on Experimental Robotics (ISER), 2018 [PDF] [Video]
- Henry M. Clever, Ariel Kapusta, Daehyung Park, Zackory Erickson, Yash Chitalia, and Charles C. Kemp. “3D Human Pose Estimation on a Configurable Bed from a Pressure Image”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 [PDF]
- Daehyung Park, Hokeun Kim, Yuuna Hoshi, Zackory Erickson, Ariel Kapusta, and Charles C. Kemp. “A Multimodal Execution Monitor with Anomaly Classification for Robot-Assisted Feeding”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017 [PDF] [Video]
- Daehyung Park, Zackory Erickson, Tapomayukh Bhattacharjee, and Charles C. Kemp. “Multimodal Execution Monitoring for Anomaly Detection During Robot Manipulation”, IEEE International Conference on Robotics and Automation (ICRA), 2016 [PDF] [Video] (34% Acceptance Rate)
- Tapomayukh Bhattacharjee, Ashwin A Shenoi, Daehyung Park, James M. Rehg, and Charles C. Kemp, "Combining Tactile Sensing and Vision for Rapid Haptic Mapping", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 [PDF]
- Ariel Kapusta, Daehyung Park, and Charles C. Kemp, "Task-Centric Selection of Robot and Environment Initial Configurations to Perform Assistive Tasks", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 [PDF]
- Daehyung Park, Ariel Kapusta, Jeffrey Hawke, and Charles C. Kemp. “Interleaving Planning and Control for Efficient Haptically-guided Reaching in Unknown Environments”, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2014 [PDF] [Video]
- Daehyung Park, Ariel Kapusta, Youkeun Kim, James M. Rehg, and Charles C. Kemp. “Learning to Reach into the Unknown: Selecting Initial Conditions When Reaching in Clutter”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014 [PDF] [Video]
- Heiko Hoffmann, Peter Pastor, Daehyung Park, and Stefan Schaal. “Biologically-inspired dynamical systems for movement generation: Automatic real-time goal adaptation and obstacle avoidance”, IEEE International Conference on Robotics and Automation (ICRA), 2009 [PDF]
- Daehyung Park, Heiko Hoffmann, Peter Pastor, and Stefan Schaal. “Movement reproduction and obstacle avoidance with dynamic movement primitives and potential fields”, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2008, Oral presentation) [PDF]
|
Graph-based 3D Collision-distance Estimation Network with Probabilistic Graph Rewiring Minjae Song, Yeseung Kim, Minjun Kim, Daehyung Park IEEE International Conference on Robotics and Automation (ICRA), 2024 (Accepted) [PDF] [Video] |
|
LINGO-Space: Language-Conditioned Incremental Grounding for Space Dohyun Kim, Nayoung Oh, Deokmin Hwang, Daehyung Park Association for the Advancement of Artificial Intelligence (AAAI), 2024 [PDF] [Site] |
|
SGGNet2: Speech-Scene Graph Grounding Network for Speech-guided Navigation Dohyun Kim*, Yeseung Kim*, Jaehwi Jang*, Minjae Song*, Woojin Choi, Daehyung Park (*- authors contributed equally) IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2023 [PDF] |
|
A Reachability Tree-Based Algorithm for Robot Task and Motion Planning Kanghyun Kim, Daehyung Park, Min Jun Kim IEEE International Conference on Robotics and Automation (ICRA), 2023 [PDF] |
|
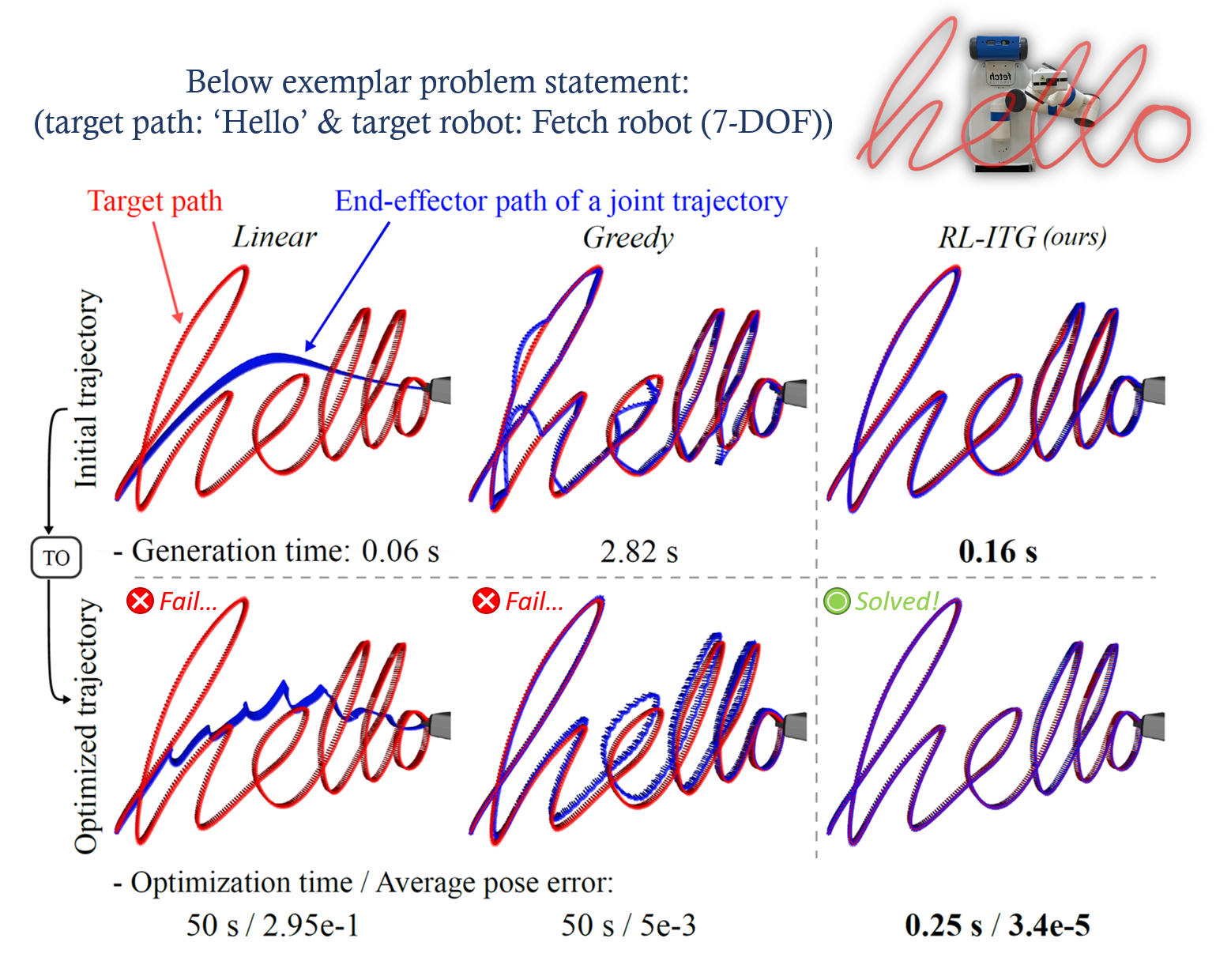
Learning-Based Initialization of Trajectory Optimization for Path-Following Problems of Redundant Manipulators Minsung Yoon, Mincheul Kang, Daehyung Park, and Sung-Eui Yoon IEEE International Conference on Robotics and Automation (ICRA), 2023. Outstanding Planning Paper Award [PDF] [Video] |
|
Natural Language-Guided Navigation using Scene Graph Dohyun Kim*, Jinwoo Kim*, Minwoo Cho, Daehyung Park (*- authors contributed equally) Conference on Robot Intelligence Technology and Applications (RiTA) 2022. Best Student Paper Award [PDF] |
|
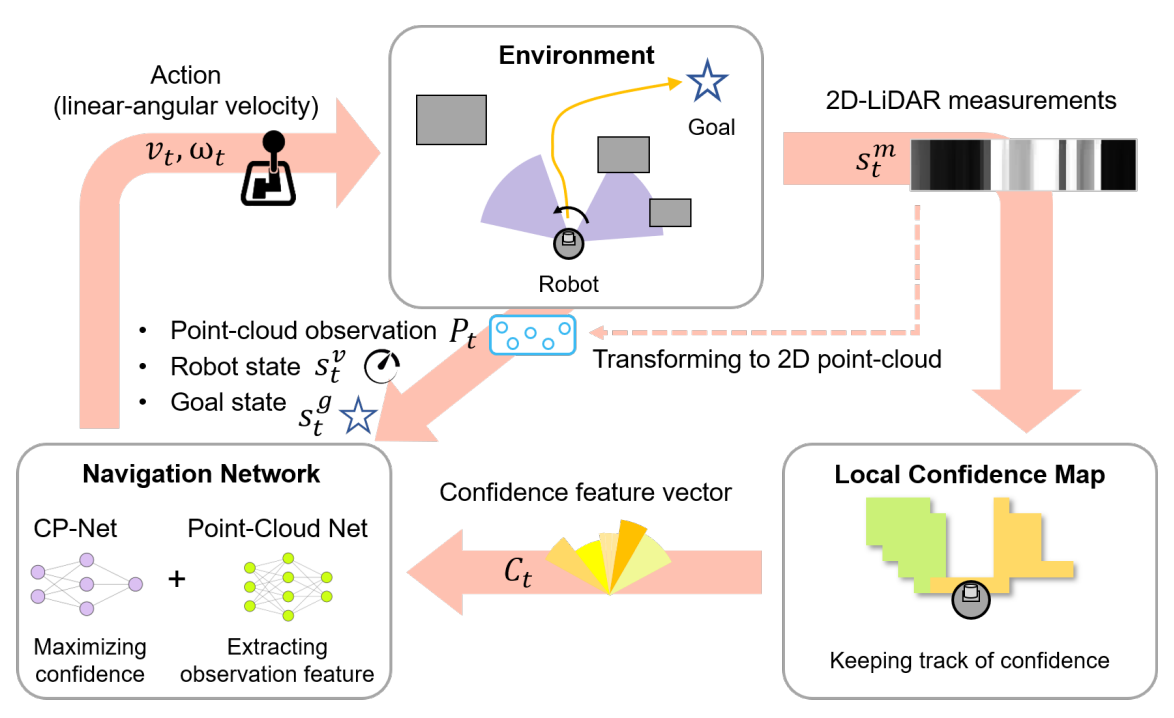
Confidence-based Robot Navigation under Sensor Occlusion with Deep Reinforcement Learning Hyeongyeol Ryu, Minsung Yoon, Daehyung Park, Sung-eui Yoon IEEE International Conference on Robotics and Automation (ICRA) 2022. Outstanding Navigation Award Finalist [PDF][Video] |
|
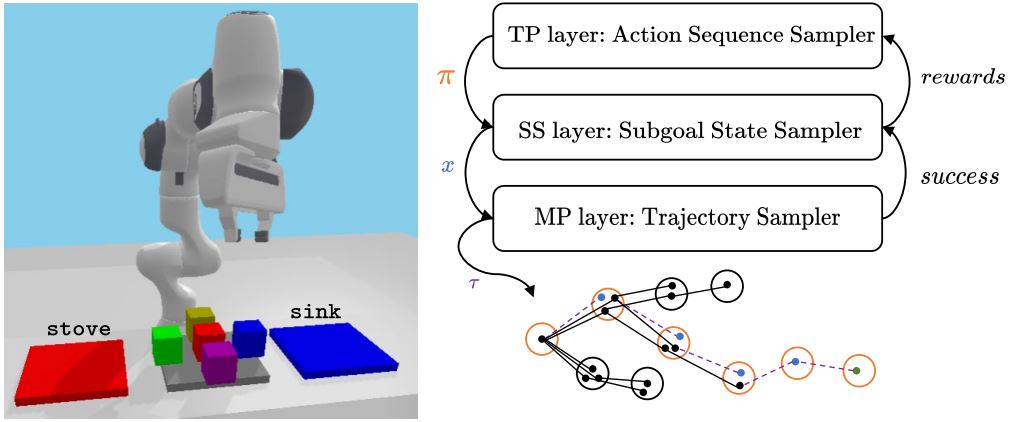
Reactive Task and Motion Planning under Temporal Logic Specifications Shen Li*, Daehyung Park*, Yoonchang Sung*, Julie Shah, Nicholas Roy (*- authors contributed equally) IEEE International Conference on Robotics and Automation (ICRA), 2021 [PDF][Video] |