Publications
Domestic Conference Articles
- Minsung Yoon, Daehyung Park, Sung-Eui Yoon, "Bias tree expansion using reinforcement learning for efficient motion planning," Korea Robotics Society Annual Conference (KRoC), 2021 [PDF]
- Hyeongyeol Ryu, Minsung Yoon, Daehyung Park, Sung-Eui Yoon, "Robust Robot Navigation against External Disturbance using Deep Reinforcement Learning," Korea Robotics Society Annual Conference (KRoC), 2021 [PDF]
|
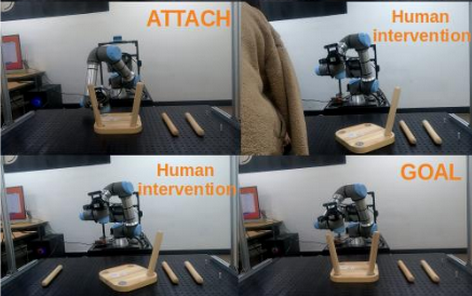
Reactive Task Planning using Scene Graph for Robust Robotic Manipulation Ulzhalgas Rakhman, Jaehoon Yoo, Yeseung Kim, Deokmin Hwang, Seunghoon Hong, and Daehyung Park Korea Robotics Society Annual Conference (KRoC), 2022 A reactive task planning-and-execution framework adopting scene-graph for automatic abstraction and behavior tree for robust task execution. We demonstrate the effectiveness and efficiency of our framework against human interventions in robotic assembly scenarios. [PDF] Outstanding Paper Award |
|
Transferable-Reward Decomposition for Inverse Reinforcement Learning Jaehwi Jang and Daehyung Park Korea Robotics Society Annual Conference (KRoC), 2022 A transferable reward-decomposition method for inverse reinforcement learning (IRL) that returns a unique pair of primary goal and its residual rewards, separately. Our method lowers the computational complexity of reward decomposition by reusing the exploration results of IRL. [PDF] |
|
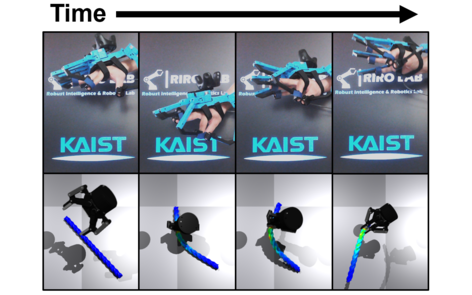
A Telemanipulation Suite for Deformable Object Manipulation Bonggyeong Park, Chanyoung Ahn, and Daehyung Park Korean Artificial intelligence Association (KAIA), 2022 Deformable object manipulation with learning from demonstration requires a dataset that absorbs human intelligence. We propose a virtual reality-based telemanipulation suite that allows an expert hand to manipulate simulated deformable objects while recording complete observations. |

|
A Framework for Natural Language-guided Semantic Mapping and Mobile Navigation Jinwoo Kim, Dohyun Kim, and Daehyung Park Korea Robotics Society Annual Conference (KRoC), 2022 A novel method for natural language-driven location labeling and mobile navigation. Our approach automatically labels the location description on a metric map via natural language grounding. By associating the semantic map with a world model, our method enables the robot to understand natural language instruction for indoor delivery navigation. [PDF] |